
今回は、前回の機体を改修したバージョン2、3のお話です。
とりあえず画像から。
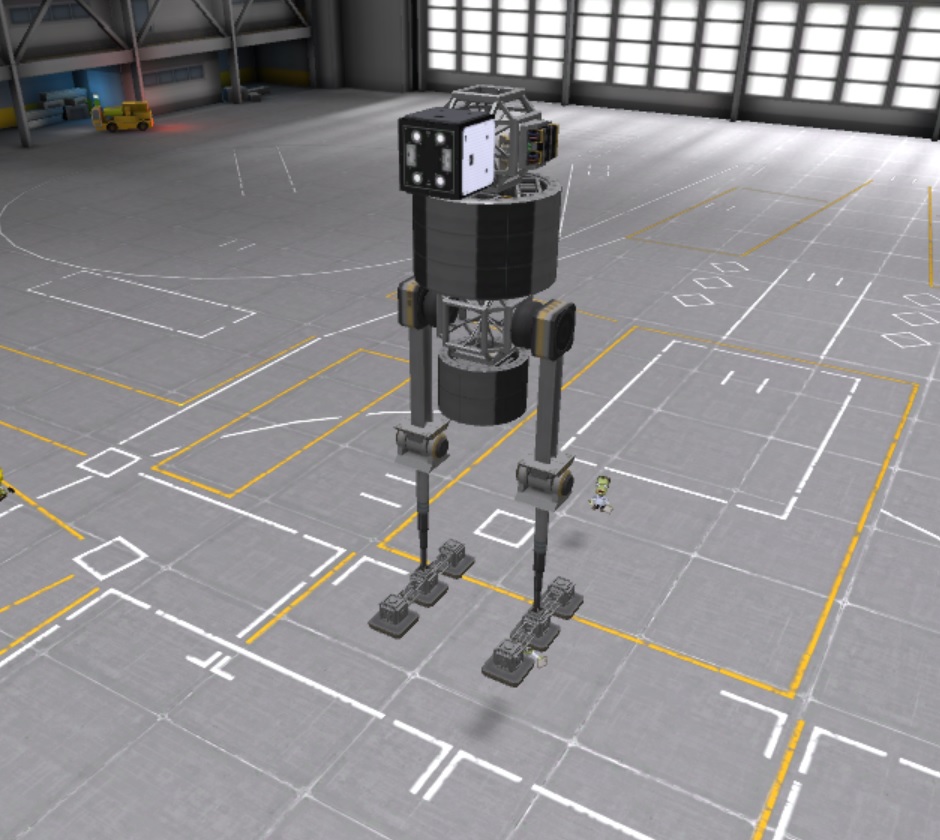
バージョン2。
バージョン3。
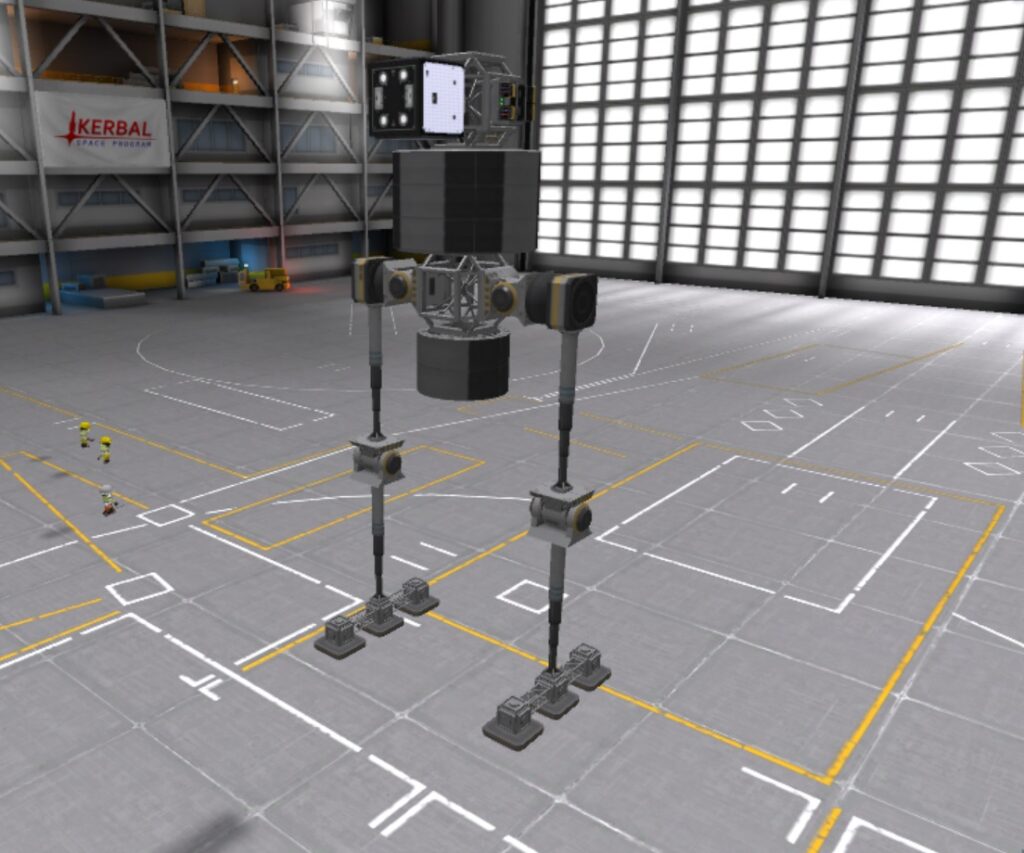
前回のをバージョン1だとすると、このバージョン2,3の両機はともに大型の姿勢制御を外しています。軽量化をしています。そしてバージョン2とバージョン3との違いは、股関節部分にヒンジを導入したことです。
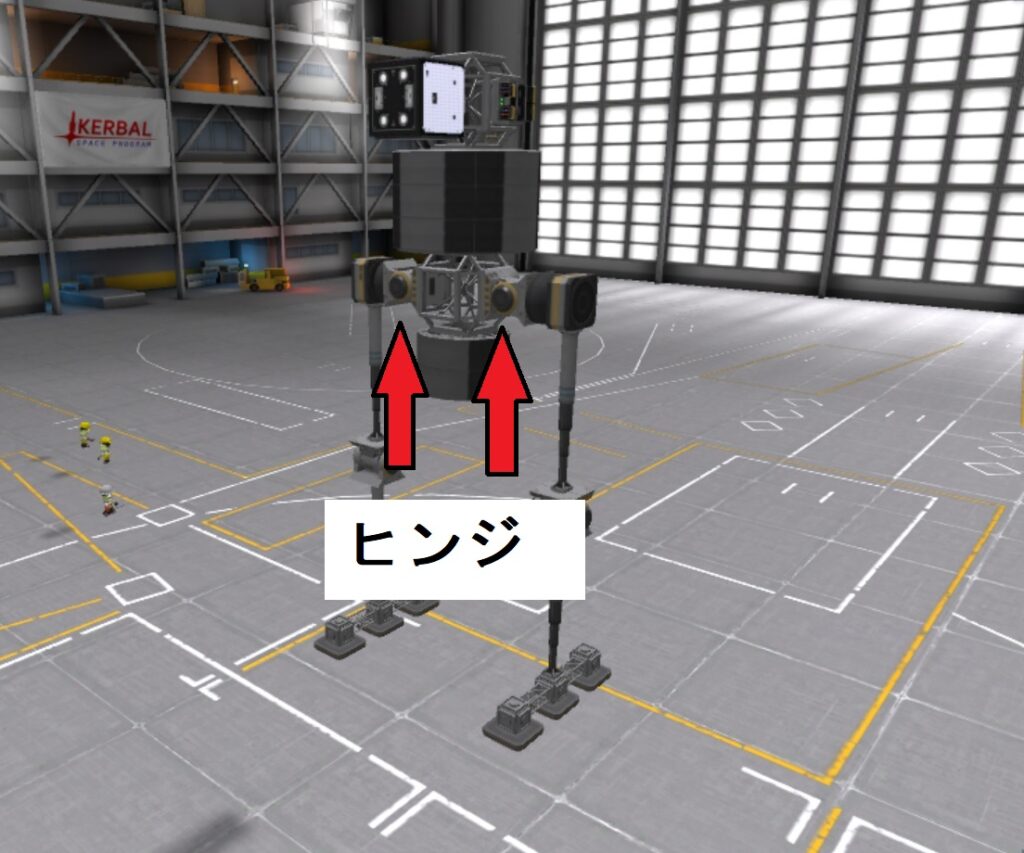
ヒンジを導入したことにより、股関節部分の動きに余裕が生まれ、全体的な動作がスムーズになっているんだと思います。(たぶん・・・)
バージョン1、2はスピードはほぼ同じですが、バージョン3は1.5から2倍のスピードがだせるようになっています。
スピードは平均1.5m/sくらいです。
時速換算5.4km/h。人の歩行スピードがおよそ4km/hなので、人より早いかなといったスピードです。(ただし、この世界は緑くんたちの世界です。緑くんたちは4km/hも出せないかな?)
上の動画内後半にKAL1000コントローラーのプログラムの動きを表示させています。まだここらへんの最適な値はでていないので、引き続き開発を行っていきたいと思います!
コメント