
最近はまってるのが二足歩行です。
「KAL1000コントローラー」というパーツがあるんですが、説明読んでもよくわからなかったので放置していました。
それで、最近色々なパーツを見直しをやっていてこのパーツを使ってみようと思ったわけです。
便利!これは非常に便利なパーツでした。
今まで、サーボやヒンジ、シリンダーの角度などを操作中に入力していましたが、これがあると、一定の動作をあらかじめ設定し、あとはアクションキーを設定をすればボタン1つで実行することができます。
KAL1000コントローラーについては、また別に記述します。
今回の本題は、戦術二足歩行機の開発です。
目標は下記の通りです。
①二足歩行
②戦闘能力の付与
③多目的使用
④可変機
①はそのまま、二足歩行ができることがまずは一番の目標です。なによりもこの目標が一番です。②はBDArmoryのパーツをつけるだけなので、問題無さそう。③はちょっと曖昧ですが、基本フレームを作りそこに簡単な改修を行い色々な機体を目指したいと考えています。④最終目標ですが、可変機を目指します。モデルはマクロスやZガンダムです。単独飛行能力かつ二足歩行機能をもつ機体にしたいです。①→②+③→④の順に開発していきます。
とりあえず初めに作った機体です。
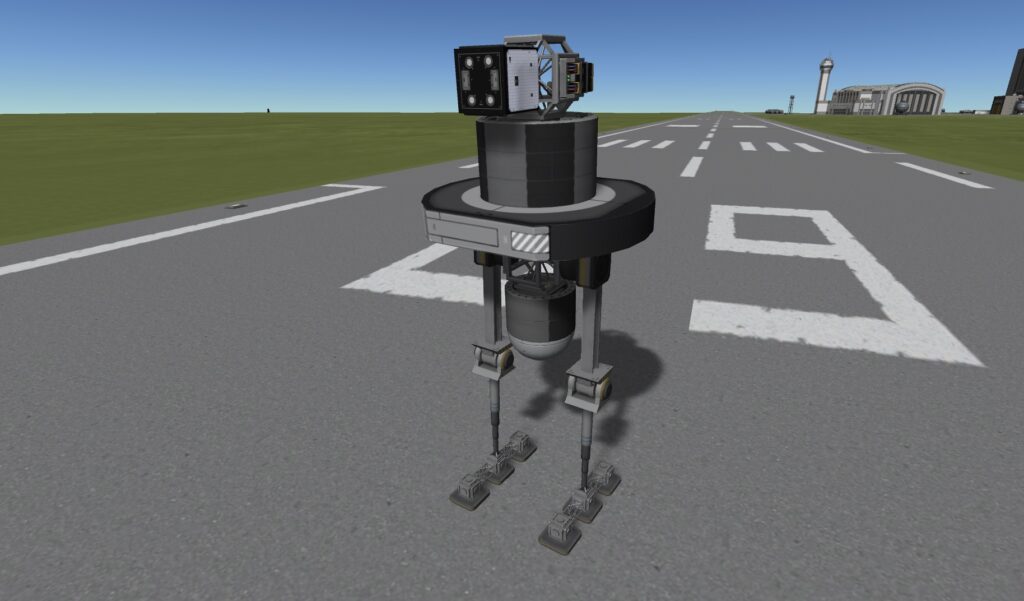
脚と姿勢制御をつけたシンプルにものです。
多めに姿勢制御(ジャイロ)を付けました。
歩行のプログラムについては下のコントローラーで行いました。
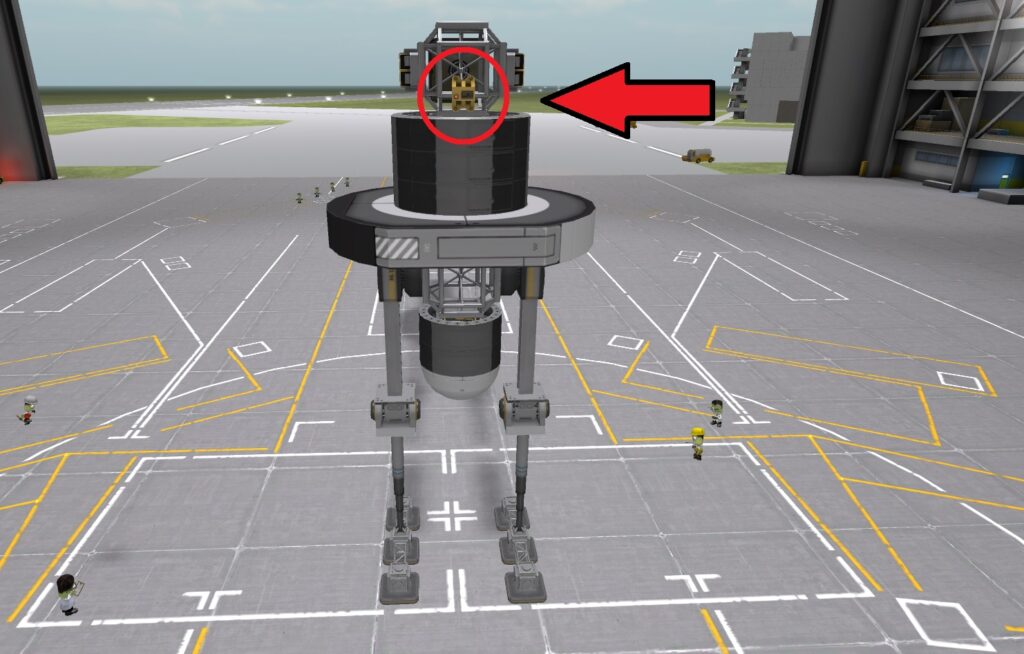
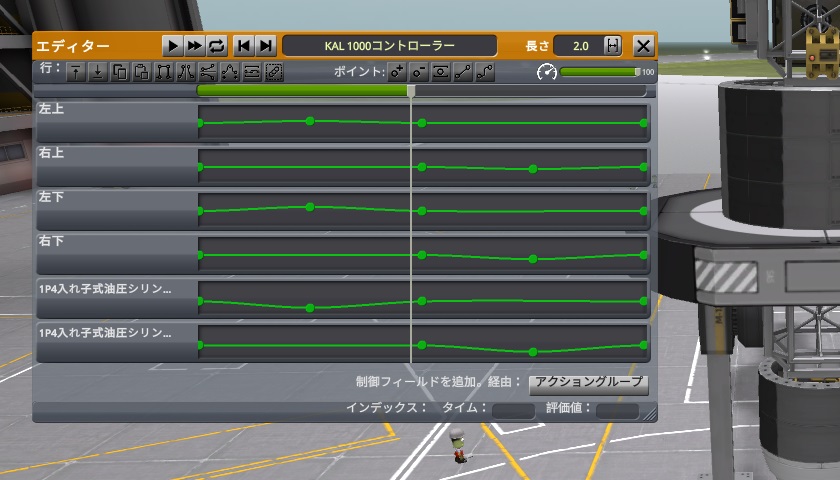
股関節(サーボ)、膝関節(ヒンジ)、ふくらはぎ(シリンダー)の動作を設定しました。
上記のプログラムだと、[左股関節アップ]+[左ひざ関節下方向に曲げる]+[左ふくらはぎの縮小]、次に今の動作を初期位置まで戻します。次に右足を同じ動作をさせます。これを繰り返して歩かせました。
見た目は、ダサすぎだけどとりあえず歩くことはできました。
小型で軽量なので、これを大きくしたり、パーツを増やすとどうなるかは、これから試行錯誤していきます!!
それでは今回はここまでです。

コメント